


Lernziele
Aufbau eines Robotersystems
Die Grundlagen der Robotik zu beherrschen heißt, den Aufbau eines Robotersystems, die wesentlichen Konzepte und grundlegende mathematische Methoden zu kennen und zu verstehen sowie ein Robotersystem bedienen zu können.
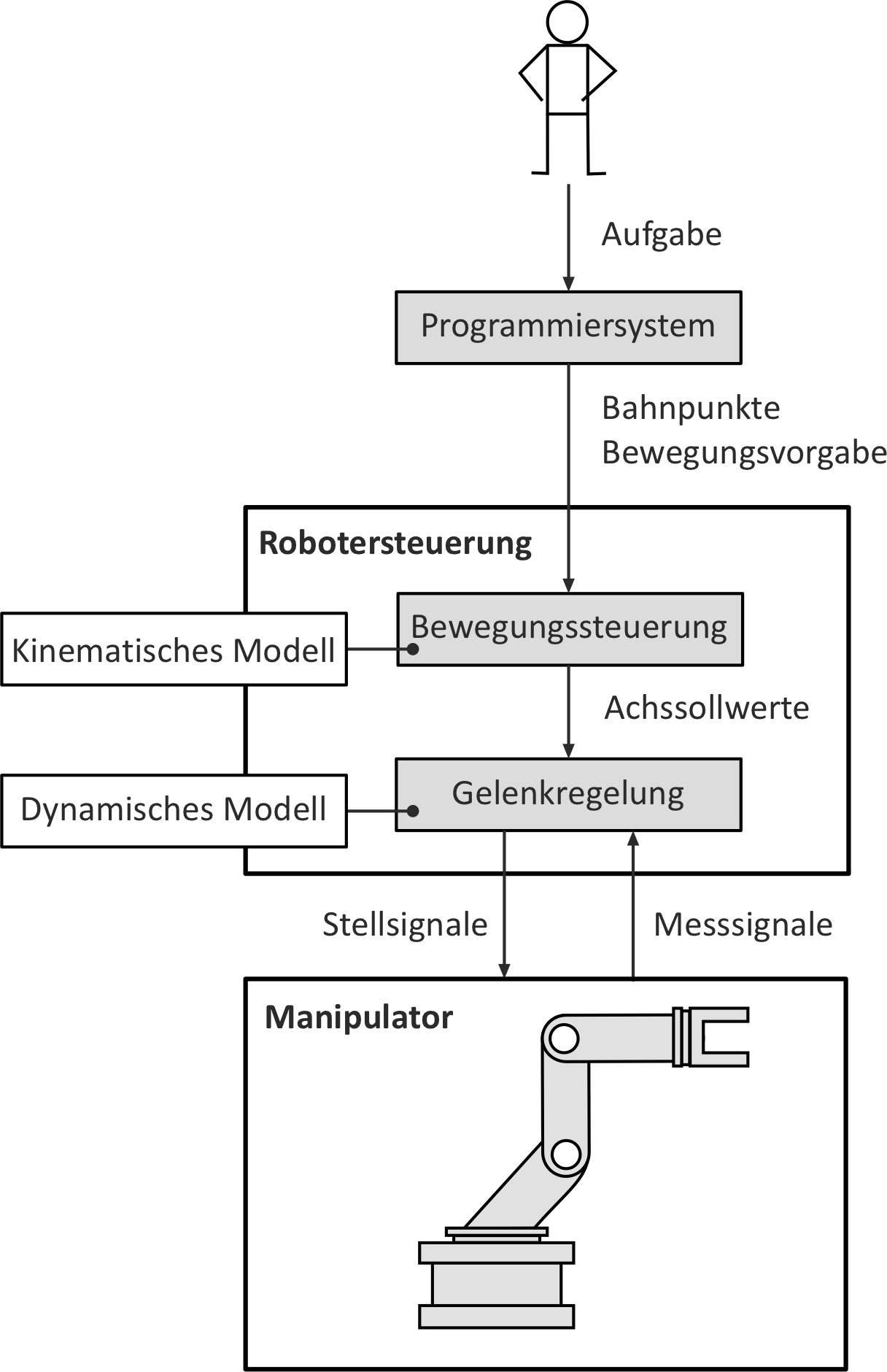
Damit ein Roboter seine Aufgabe erledigen kann, greifen die Einzelmechanismen eines Robotersystems zusammen (Abbildung links): Über das Programmiersystem programmiert die*der Bediener*in einzelne Punkte im Raum, sogenannte Bahnpunkte, die über die Bewegungssteuerung zu einer Bahnkurve miteinander verbunden werden. Die Gelenkregelung verfolgt nun das Ziel, dass der Manipulator die so entstandene Bahn auch tatsächlich abfährt, indem die Antriebe gestellt und die aktuellen Messwerte ausgelesen werden.
Sie lernen den grundlegenden Aufbau eines Manipulators kennen und verstehen, warum Roboter so aussehen wie sie aussehen. Wir tauchen tiefer in die mathematischen Grundlagen der Roboterkinematik und -dynamik ein und betrachten und diskutieren rudimentäre Algorithmen und Methoden der Bahnsteuerung und der Gelenkregelung.
In dem Praktikum lernen Sie ein Robotersystem zu bedienen und programmieren schrittweise eine von Ihnen individuell gestaltete praxisnahe Aufgabe.


Inhalte
Die Veranstaltung gibt einen Einstieg in die Theorie und die Praxis der industriellen Robotik. Angelehnt an die Struktur eines Robotersystems (siehe Abbildung oben links) lautet der Inhalt wie folgt:
- Grundlagen: Begriffe, Definitionen, Kategorien und Anwendungsgebiete der Robotik, Aufbau eines Robotersystems, mathematische Grundlagen
- Aufbau eines Manipulators: Kinematische Strukturen, Aktoren, interne und externe Sensoren und elektronische Komponenten
- Beschreibung der Lage im Raum: Koordinatensysteme, Rotationsmatrizen, homogene Transformation, Euler-Winkel
- Kinematisches und dynamisches Verhalten: Vorwärts- und Rückwärtskinematik, Denavit-Hartenberg-Konvention, Differentielle Kinematik und Jacobi-Matrix, Mehrdeutigkeiten und Singularitäten, einfache Modellierung des dynamischen Verhaltens
- Bewegungssteuerung: Pfad- und Trajektorienplanung, Interpolationsalgorithmen
- Gelenkregelung: Gelenkregelungskonzepte, dezentrale Gelenkregelung
- Programmiersystem: Online- und Offline-Programmierung
- Sicherheit
- Praktikum: Bedienung und Programmierung eines Industrieroboters
Literatur
Eine Auswahl der von mir empfohlenen Literatur ist folgende:
- W. Spong et al. Robot Modeling and Control, 2. Auflage, Wiley- Blackwell, 2020
- Mareczek. Grundlagen der Roboter-Manipulation - Band 1 und 2, Springer, 2020
- Siciliano et al. Robotics: Modelling, Planning and Control, Springer, 2008
- Weber. Industrieroboter, 4. Auflage, Hanser, 2019
Zielgruppe
Wahlmodul für
- Bachelor Elektrotechnik,
- Bachelor Wirtschaftsingenieurwesen Elektrotechnik,
- Bachelor Informatik und
- weitere nach Rücksprache
Organisatorisches
| Umfang |
2 SWS seminaristischer Unterricht 1 SWS Übung 2 SWS Praktikum (keine Vor- und Nachbereitung notwendig) |
| Leispungspunkte | 5 |
| Voraussetzungen |
Modul Mathematik 1 und Mathematik 2 sollten absolviert sein |
| Voraussetzung für die Zulassung zur Prüfung |
Erfolgreiche Teilnahme an dem Praktikum |
| Prüfungsform |
Mündliche Prüfung |